Project 7: Producer-Consumer with Mutexes and Condition Variables
Implement a bounded producer-consumer queue with mutexes and condition variables.
Quick Reference
| Attribute | Value |
|---|---|
| Difficulty | Level 3 (Advanced) |
| Time Estimate | 1 Week |
| Main Programming Language | C (Alternatives: Rust, C++) |
| Alternative Programming Languages | Rust, C++ |
| Coolness Level | Level 3 (Genuinely Clever) |
| Business Potential | Level 1 (Resume Gold) |
| Prerequisites | C programming, basic IPC familiarity, Linux tools (strace/ipcs) |
| Key Topics | mutex, condvar, bounded buffer, spurious wakeups |
1. Learning Objectives
By completing this project, you will:
- Build a working IPC-based system aligned with Stevens Vol. 2 concepts.
- Implement robust lifecycle management for IPC objects.
- Handle errors and edge cases deterministically.
- Document and justify design trade-offs.
- Benchmark or validate correctness under load.
2. All Theory Needed (Per-Concept Breakdown)
Mutexes, Condition Variables, and Bounded Buffers
Fundamentals
A mutex enforces mutual exclusion: only one thread can hold it at a time. A condition variable allows threads to sleep until a condition becomes true. The classic producer-consumer problem uses a mutex to protect a shared buffer and two condition variables (or one) to signal when the buffer is not empty and not full. The key invariant is that the buffer indices and counts are only modified while holding the mutex.
Condition variables are not events; they do not store state. They are a way to sleep and wake based on a predicate. Therefore, every pthread_cond_wait must be in a loop that re-checks the predicate. This is not optional; spurious wakeups exist, and other threads may consume the buffer before a woken thread runs.
Deep Dive into the Concept
The producer-consumer pattern has a precise correctness contract: producers must never write into a full buffer, consumers must never read from an empty buffer, and no item should be lost or duplicated. Implementations often use a ring buffer with head/tail indices and a count. The mutex protects the indices and count. The condition variable is used to block producers when count == capacity and block consumers when count == 0.
Understanding the interaction between pthread_cond_wait and the mutex is critical. pthread_cond_wait atomically releases the mutex and puts the thread to sleep, then re-acquires the mutex before returning. This prevents missed wakeups: the thread does not release the mutex and then go to sleep as two separate steps. You must still use a while loop around the wait: while (count == 0) pthread_cond_wait(...). This is the standard POSIX pattern.
A subtle issue is fairness. If you always signal only one thread (pthread_cond_signal), the same thread might win repeatedly depending on scheduling. If fairness matters, use pthread_cond_broadcast or implement your own scheduling policy. Another subtlety is performance: using a single mutex and condition is fine for a small buffer, but for high throughput you may need to minimize contention or use separate mutexes for head and tail in a single-producer/single-consumer scenario.
How this fits on projects
This concept is the core of the producer-consumer project and is reused in shared-memory pipelines where threads coordinate access to a buffer.
Definitions & key terms
- Mutex -> Mutual exclusion lock for critical sections.
- Condition variable -> Sleep/wake mechanism based on a predicate.
- Bounded buffer -> Fixed-size queue with head/tail indices.
- Spurious wakeup -> Wakeup without the condition being true.
Mental model diagram (ASCII)
Producer --> [ Ring Buffer ] --> Consumer
^ ^ |
| | v
mutex cond_not_full cond_not_empty
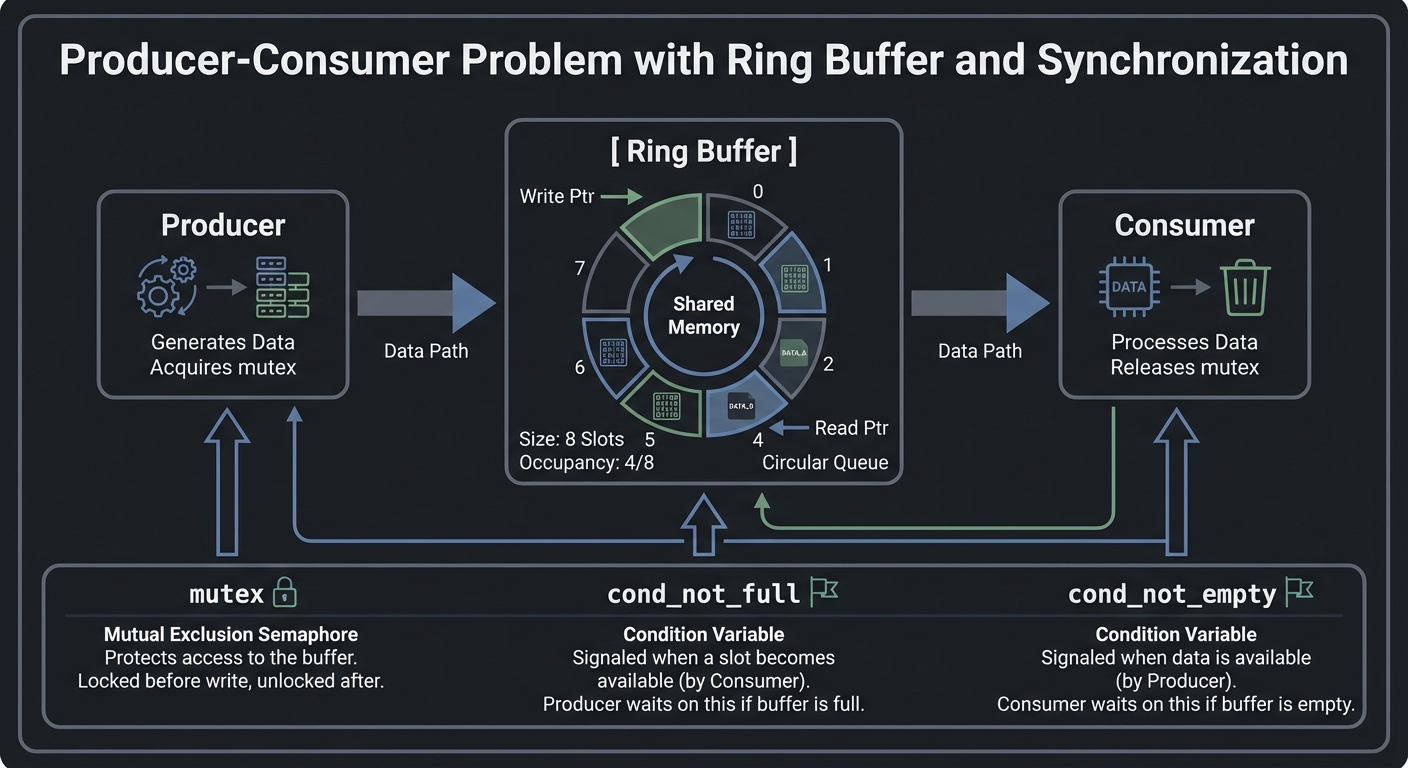
How it works (step-by-step, with invariants and failure modes)
- Producer locks mutex.
- If buffer full, wait on cond_not_full.
- Insert item, update count.
- Signal cond_not_empty.
- Unlock mutex.
- Consumer does the reverse.
Failure modes: missing while-loop, signaling without holding mutex, data races on indices.
Minimal concrete example
pthread_mutex_lock(&m);
while (count == 0) pthread_cond_wait(¬_empty, &m);
item = buf[tail++ % cap];
count--;
pthread_cond_signal(¬_full);
pthread_mutex_unlock(&m);
**Common misconceptions**
- "Condition variables store signals." -> They do not; the predicate is the truth.
- "`if` is enough." -> Use `while` to handle spurious wakeups.
- "Mutex only protects data." -> It also protects the condition predicate.
**Check-your-understanding questions**
1. Why must you use a while loop around `pthread_cond_wait`?
2. What invariant must hold for the buffer count?
3. When should you use `signal` vs `broadcast`?
**Check-your-understanding answers**
1. Because wakeups can be spurious or other threads may consume first.
2. `0 <= count <= capacity` must always hold.
3. Use broadcast when multiple threads might be eligible and you need fairness.
**Real-world applications**
- Thread-safe queues.
- Work-stealing schedulers.
**Where you’ll apply it**
- In this project: §3.2 Functional Requirements, §5.10 Phase 2.
- Also used in: [P13-sysv-shm-images.md](P13-sysv-shm-images.md).
**References**
- "Programming with POSIX Threads" by Butenhof.
- `man 7 pthreads`, `man 3 pthread_cond_wait`.
**Key insights**
- Correctness is about invariants and predicates, not about the signal itself.
**Summary**
Mutexes and condition variables are the standard toolkit for bounded buffers and multi-thread coordination. Mastering them is required for safe shared-memory IPC.
**Homework/Exercises to practice the concept**
1. Implement a bounded buffer with two producers and two consumers.
2. Intentionally replace `while` with `if` and observe bugs.
3. Add counters for wakeups and signals.
**Solutions to the homework/exercises**
1. Use a single mutex and two cond vars; validate count invariants.
2. Under load, observe spurious wakeups or missed signals.
3. Track how many times each cond is signaled vs waited.
---
## 3. Project Specification
### 3.1 What You Will Build
Implement a bounded producer-consumer queue with mutexes and condition variables.
### 3.2 Functional Requirements
1. **Requirement 1**: Multiple producers and consumers
2. **Requirement 2**: No busy waiting
3. **Requirement 3**: Correct shutdown when producers finish
### 3.3 Non-Functional Requirements
- **Performance**: Must handle at least 10,000 messages/operations without failure.
- **Reliability**: IPC objects are cleaned up on shutdown or crash detection.
- **Usability**: CLI output is readable with clear error codes.
### 3.4 Example Usage / Output
```text
./pc_queue --producers 4 --consumers 4 --items 100000
### 3.5 Data Formats / Schemas / Protocols
Shared struct: {buffer[], head, tail, count}.
### 3.6 Edge Cases
- Spurious wakeups
- Missed signal
- Shutdown race
### 3.7 Real World Outcome
You will have a working IPC subsystem that can be run, traced, and tested in a reproducible way.
#### 3.7.1 How to Run (Copy/Paste)
```bash
make
./run_demo.sh
#### 3.7.2 Golden Path Demo (Deterministic)
```bash
./run_demo.sh --mode=golden
Expected output includes deterministic counts and a final success line:
```text
OK: golden scenario completed
#### 3.7.3 Failure Demo (Deterministic)
```bash
./run_demo.sh --mode=failure
Expected output:
```text
ERROR: invalid input or unavailable IPC resource
exit=2
---
## 4. Solution Architecture
### 4.1 High-Level Design
Client/Producer -> IPC Layer -> Server/Consumer
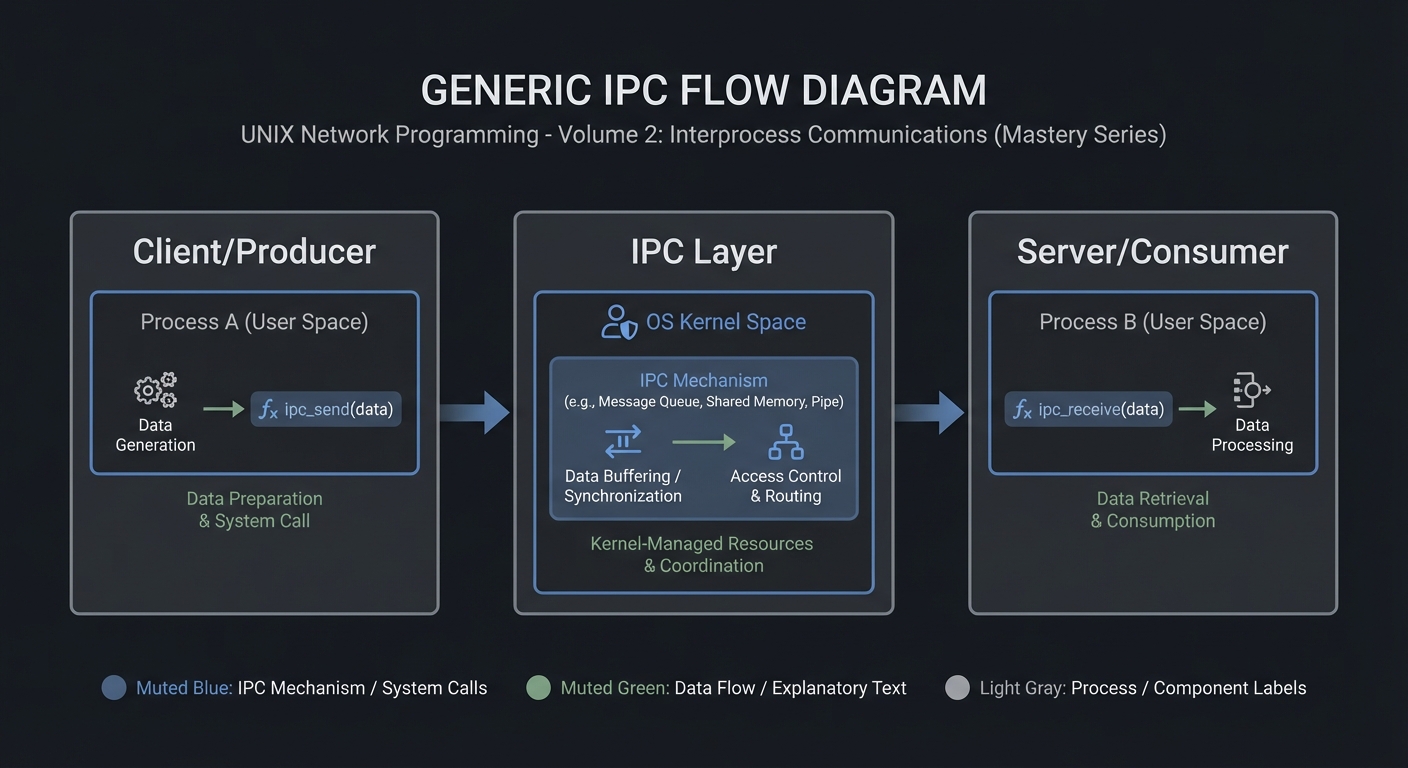
4.2 Key Components
| Component | Responsibility | Key Decisions |
|---|---|---|
| IPC Setup | Create/open IPC objects | POSIX vs System V choices |
| Worker Loop | Send/receive messages | Blocking vs non-blocking |
| Cleanup | Unlink/remove IPC objects | Crash safety |
4.3 Data Structures (No Full Code)
struct message {
int id;
int len;
char payload[256];
};
### 4.4 Algorithm Overview
**Key Algorithm: IPC Request/Response**
1. Initialize IPC resources.
2. Client sends request.
3. Server processes and responds.
4. Cleanup on exit.
**Complexity Analysis:**
- Time: O(n) in number of messages.
- Space: O(1) per message plus IPC buffer.
---
## 5. Implementation Guide
### 5.1 Development Environment Setup
```bash
sudo apt-get install build-essential
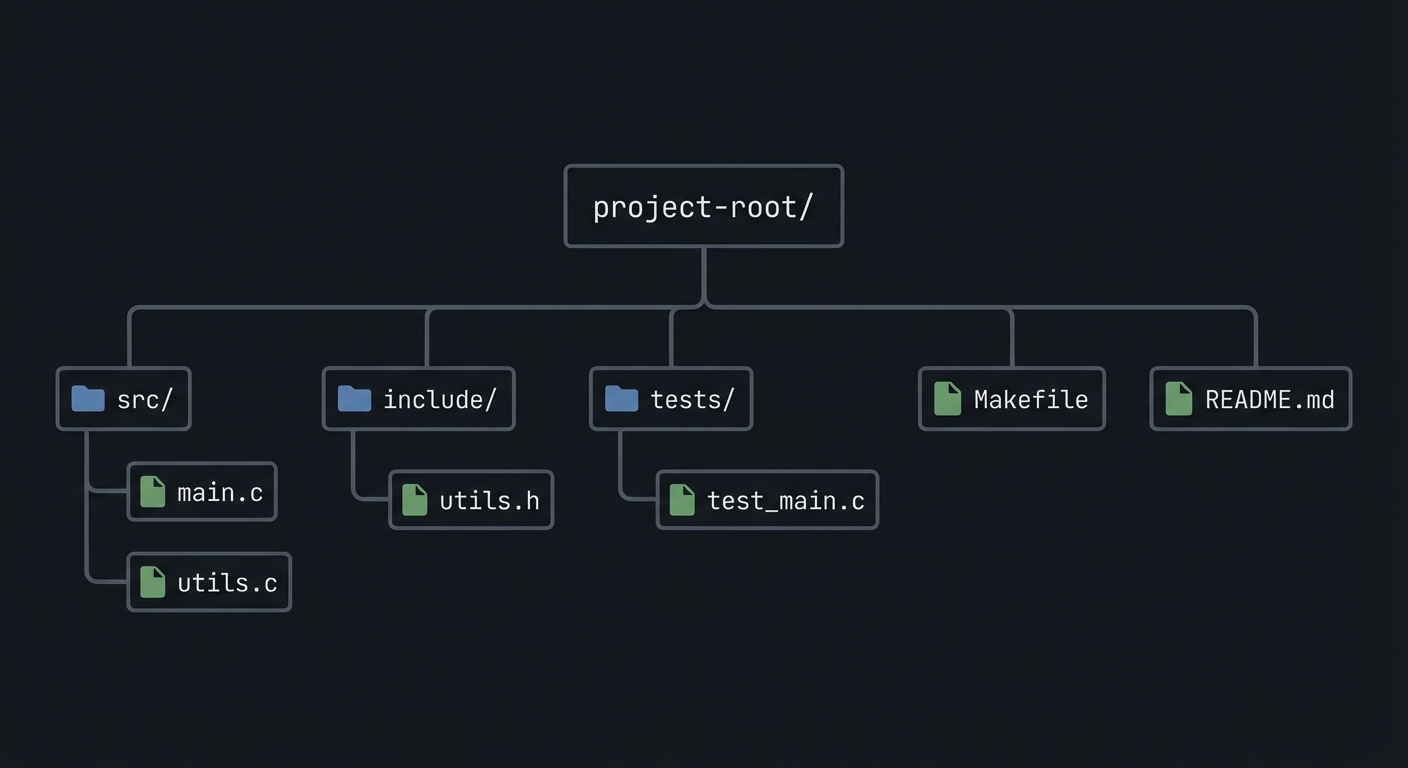
### 5.2 Project Structure
project-root/
├── src/
├── include/
├── tests/
├── Makefile
└── README.md
5.3 The Core Question You’re Answering
“How do threads safely coordinate access to a bounded buffer?”
5.4 Concepts You Must Understand First
- IPC object lifecycle (create/open/unlink)
- Blocking vs non-blocking operations
- Error handling with errno
5.5 Questions to Guide Your Design
- What invariants guarantee correctness in this IPC flow?
- How will you prevent resource leaks across crashes?
- How will you make the system observable for debugging?
5.6 Thinking Exercise
Before coding, sketch the IPC lifecycle and identify where deadlock could occur.
5.7 The Interview Questions They’ll Ask
- Why choose this IPC mechanism over alternatives?
- What are the lifecycle pitfalls?
- How do you test IPC code reliably?
5.8 Hints in Layers
Hint 1: Start with a single producer and consumer.
Hint 2: Add logging around every IPC call.
Hint 3: Use strace or ipcs to verify resources.
5.9 Books That Will Help
| Topic | Book | Chapter |
|---|---|---|
| IPC fundamentals | Stevens, UNP Vol 2 | Relevant chapters |
| System calls | APUE | Ch. 15 |
5.10 Implementation Phases
Phase 1: Foundation (2-4 hours)
Goals:
- Create IPC objects.
- Implement a minimal send/receive loop.
Tasks:
- Initialize IPC resources.
- Implement basic client and server.
Checkpoint: Single request/response works.
Phase 2: Core Functionality (4-8 hours)
Goals:
- Add error handling and cleanup.
- Support multiple clients or concurrent operations.
Tasks:
- Add structured message format.
- Implement cleanup on shutdown.
Checkpoint: System runs under load without leaks.
Phase 3: Polish & Edge Cases (2-4 hours)
Goals:
- Add deterministic tests.
- Document behaviors.
Tasks:
- Add golden and failure scenarios.
- Document limitations.
Checkpoint: Tests pass, behavior documented.
5.11 Key Implementation Decisions
| Decision | Options | Recommendation | Rationale |
|---|---|---|---|
| Blocking mode | blocking vs non-blocking | blocking | Simpler for first version |
| Cleanup | manual vs automated | explicit cleanup | Avoid stale IPC objects |
6. Testing Strategy
6.1 Test Categories
| Category | Purpose | Examples |
|---|---|---|
| Unit Tests | Validate helpers | message encode/decode |
| Integration Tests | IPC flow | client-server round trip |
| Edge Case Tests | Failure modes | missing queue, full buffer |
6.2 Critical Test Cases
- Single client request/response works.
- Multiple requests do not corrupt state.
- Failure case returns exit code 2.
6.3 Test Data
Input: “hello” Expected: “hello”
7. Common Pitfalls & Debugging
7.1 Frequent Mistakes
| Pitfall | Symptom | Solution |
|---|---|---|
| Not cleaning IPC objects | Next run fails | Add cleanup on exit |
| Blocking forever | Program hangs | Add timeouts or non-blocking mode |
| Incorrect message framing | Corrupted data | Add length prefix and validate |
7.2 Debugging Strategies
- Use
strace -fto see IPC syscalls. - Use
ipcsor/dev/mqueueto inspect objects.
7.3 Performance Traps
- Small queue sizes cause frequent blocking.
8. Extensions & Challenges
8.1 Beginner Extensions
- Add verbose logging.
- Add a CLI flag to toggle non-blocking mode.
8.2 Intermediate Extensions
- Add request timeouts.
- Add a metrics report.
8.3 Advanced Extensions
- Implement load testing with multiple clients.
- Add crash recovery logic.
9. Real-World Connections
9.1 Industry Applications
- IPC services in local daemons.
- Message-based coordination in legacy systems.
9.2 Related Open Source Projects
- nfs-utils - Uses RPC and IPC extensively.
- systemd - Uses multiple IPC mechanisms.
9.3 Interview Relevance
- Demonstrates system call knowledge and concurrency reasoning.
10. Resources
10.1 Essential Reading
- Stevens, “UNP Vol 2”.
- Kerrisk, “The Linux Programming Interface”.
10.2 Video Resources
- Unix IPC lectures from OS courses.
10.3 Tools & Documentation
man 7 ipc,man 2for each syscall.
10.4 Related Projects in This Series
11. Self-Assessment Checklist
11.1 Understanding
- I can describe IPC object lifecycle.
- I can explain blocking vs non-blocking behavior.
- I can reason about failure modes.
11.2 Implementation
- All functional requirements are met.
- Tests pass.
- IPC objects are cleaned up.
11.3 Growth
- I can explain design trade-offs.
- I can explain this project in an interview.
12. Submission / Completion Criteria
Minimum Viable Completion:
- Basic IPC flow works with correct cleanup.
- Error handling returns deterministic exit codes.
Full Completion:
- Includes tests and deterministic demos.
- Documents trade-offs and limitations.
Excellence (Going Above & Beyond):
- Adds performance benchmarking and crash recovery.